
CS231n Machine Learning Classifiers in C++
 This project contains my c++ implementation of the SVM and Softmax loss functions in addition to the simple two-layer Neural Network. They were developed for visualization and understanding while doing CS231n from Stanford University in 2016.
This project contains my c++ implementation of the SVM and Softmax loss functions in addition to the simple two-layer Neural Network. They were developed for visualization and understanding while doing CS231n from Stanford University in 2016.
 Robot localization with deep neural networks on 2D occupancy grid maps. The goal of the research project is to explore the capabilities of the neural networks to localize the robot on a 2D plane, given the odometry and 2D laser scans.
Robot localization with deep neural networks on 2D occupancy grid maps. The goal of the research project is to explore the capabilities of the neural networks to localize the robot on a 2D plane, given the odometry and 2D laser scans. Implementation of the volumetric denoising filter BM4D on GPU using CUDA. The resulting GPU implementation is 116x times faster than available original CPU implementation. Evaluation of the fully-convolutional U-Net for the cell segmentation in the calcium time-series.
Implementation of the volumetric denoising filter BM4D on GPU using CUDA. The resulting GPU implementation is 116x times faster than available original CPU implementation. Evaluation of the fully-convolutional U-Net for the cell segmentation in the calcium time-series.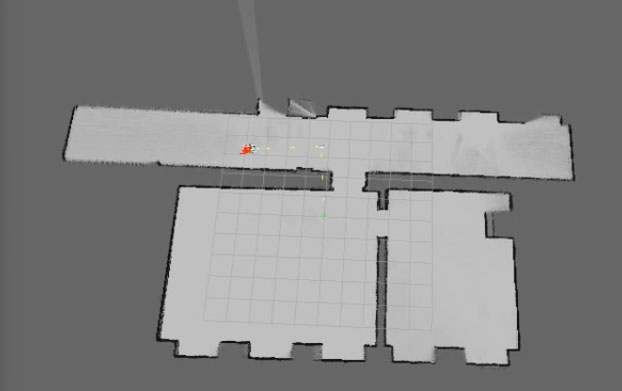 Development of the four SLAM ROS packages for the MRPT library. This includes ROS package for Rao-Blackwellized Particle Filter, 2D and 3D Extended Kalman Filter SLAM, 2D ICP SLAM.
Development of the four SLAM ROS packages for the MRPT library. This includes ROS package for Rao-Blackwellized Particle Filter, 2D and 3D Extended Kalman Filter SLAM, 2D ICP SLAM.